OVERVIEW
APPLICATIONS
INTERACTIVE APPLETS
HISTORY OF THE METHODS/FLOW CHART
PUBLICATIONS
EDUCATIONAL MATERIAL
ABOUT THE AUTHOR/CV
Copyright:
1996-2010
J.A. Sethian
Seismic velocity estimation
|
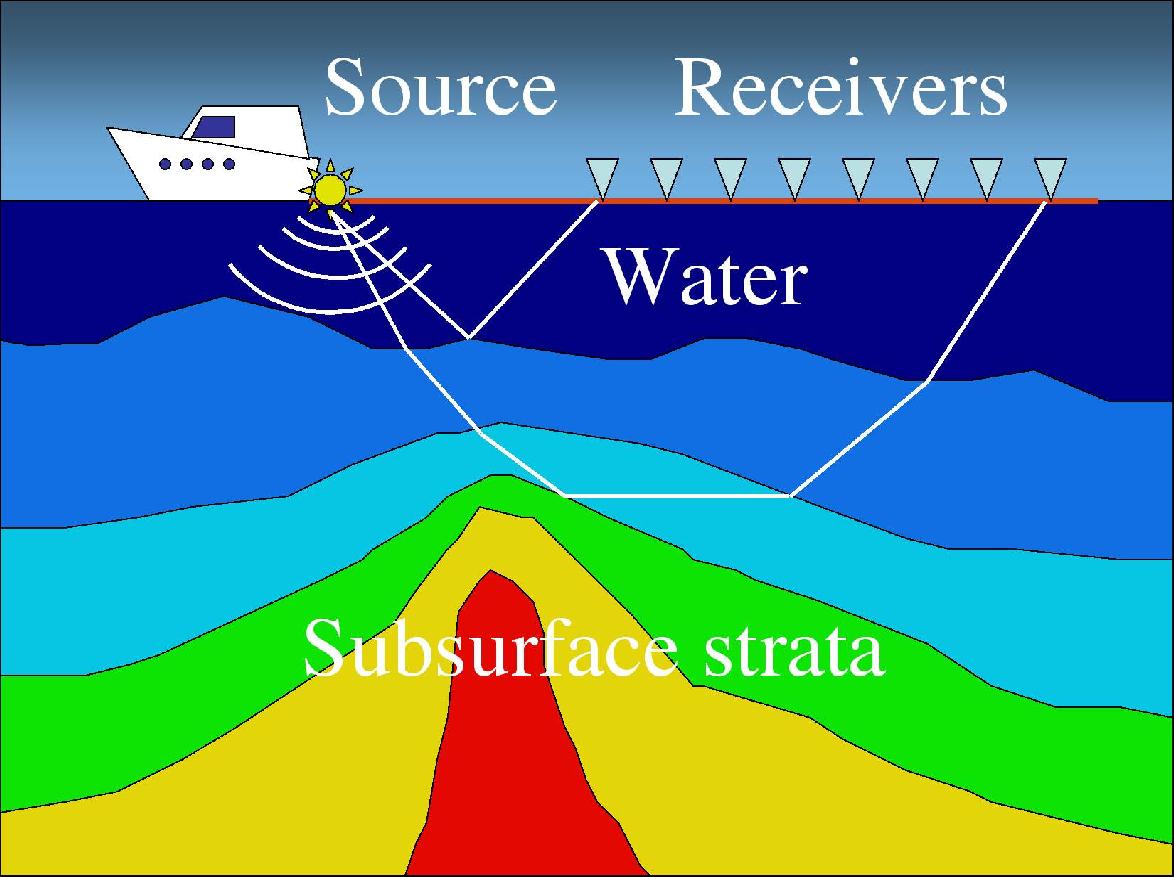
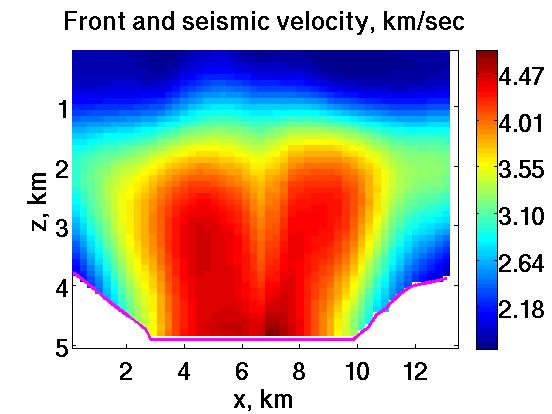
Imagine a boat releasing impulsive sounds waves (a.k.a. explosions) at equal intervals of time. The pressure waves propagate down to the seabed and then deeper into the earth: they are reflected by both the seabed and from underground layer boundaries. Seismic data are produced by towed receivers which record the amplitudes and times of the reflected signals. Our goal is to build a fast and robust algorithm for finding the sound speeds ("seismic velocities") inside the earth from these data. Careful measurements of the seismic velocity are part of obtaining accurate seismic images showing layers and cracks inside the earth, and are used to determine geologic features, such as the location of oil trapped at the sides of a salt dome, shown here by the red color. |
|
What are some challenges in seismic imaging?
|
|
|
|
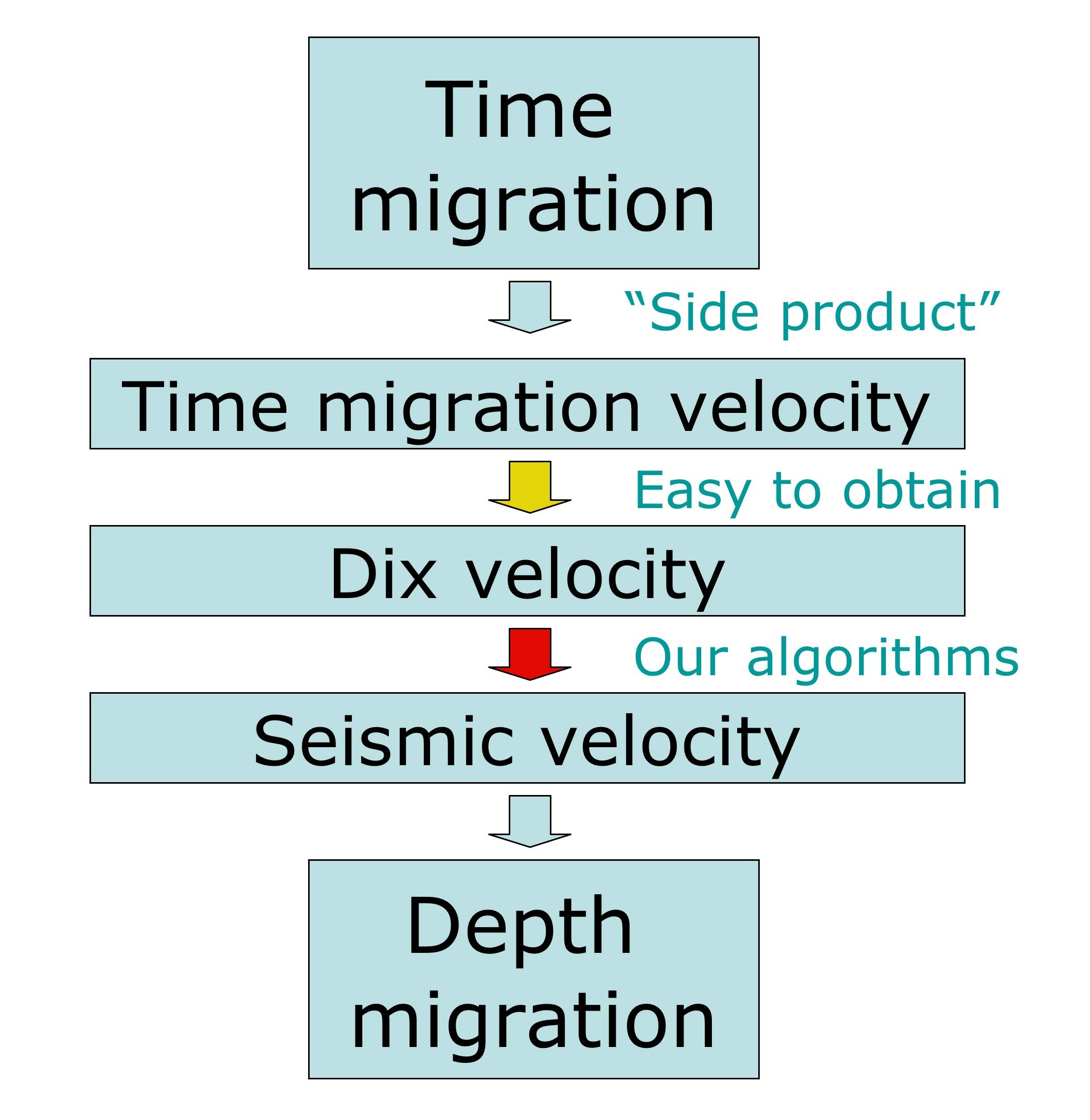
The two main approaches to seismic imaging produce models for the underground velocities: the first is a process called time migration, which takes seismic data in time coordinates, and produces images and time-migration velocities, which are an averaged velocity of a particular type. The second, depth migration, takes seismic data in depth coordinates and produces seismic images in depth coordinates.
Time migration has the advantage that it is fast and efficient, however:
|
|
The inverse problem
Ultimately, we are faced with an inverse problem:
|
|
|
Numerical algorithms
We have done the following:
- First, we have produced a theoretical relation between the time migration velocity and the true seismic velocity in 2D and 3D: we have found that the two are linked through a certain thing called geometrical spreading.
- Second, we have produced three numerical algorithms for constructing the
seismic velocity from the time migration velocity. They are (with some
limitations):
- An efficient, Dijkstra-like time-to-depth conversion algorithm;
- A conversion algorithm which uses this theoretical relation and a ray tracing approach;
- A conversion algorithm which uses this theoreticl relation and a level set approach.
To begin, the first arrival of a propagating pressure wave front can be
described by the Eikonal equation. This equation describes when a wave
first reaches a point: its right-hand side is the seismic velocity. In our
case, this seismic velocity as a function of the depth coordinates (x,z)
is unknown, and one of our goals it construct it.
|
|
Movies of the Algorithms at Work
|
|
| Construction of Depth data from Time Coordinates | Propagating Interface Filling in Velocity Data |
Synthetic data example
Field data example
|
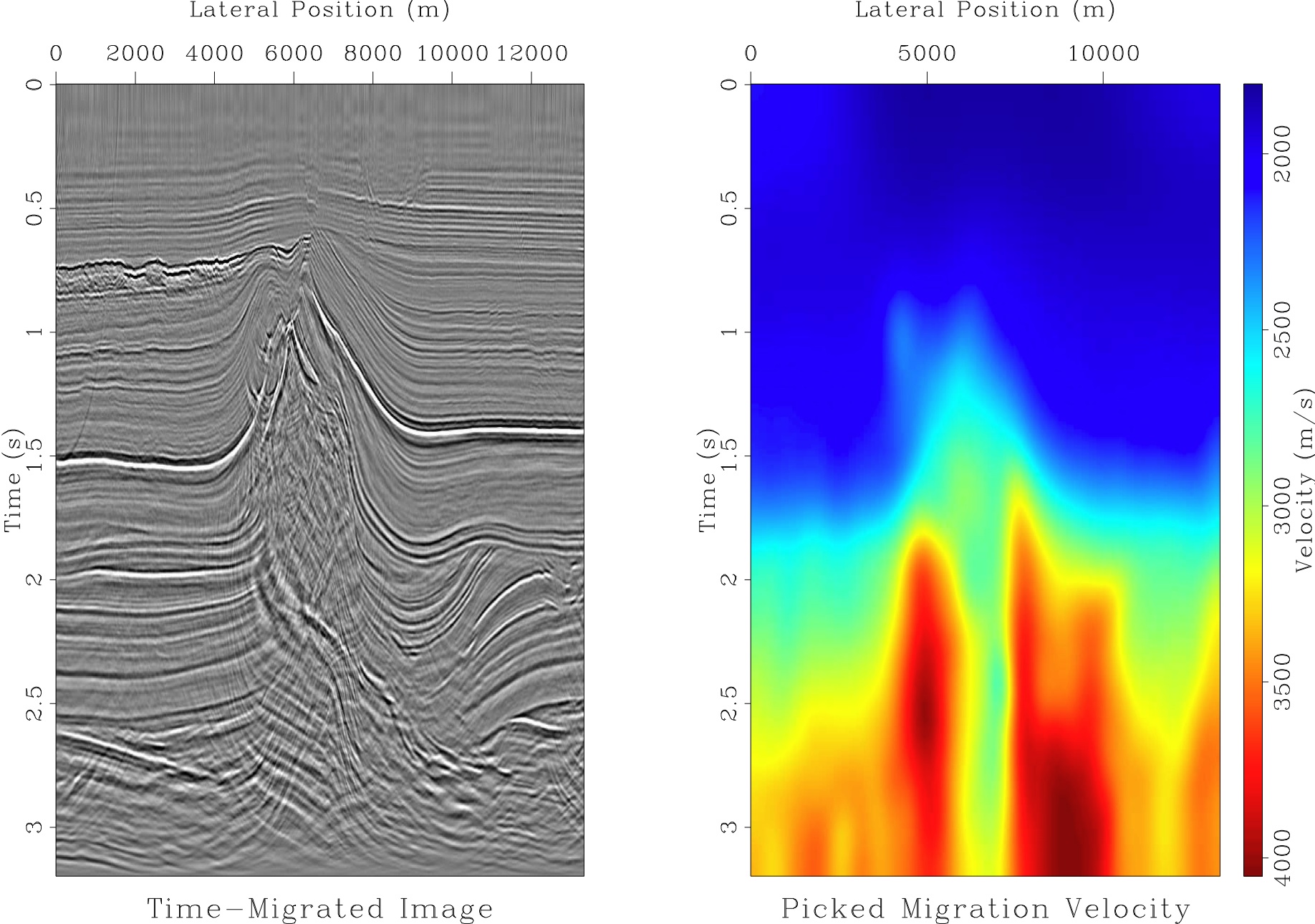
Left: seismic image from the North Sea obtained by the time migration.
Right: the corresponding time migration velocity. The image is in the time coordinates. The main feature in it is the salt dome in the middle. Typically, the seismic velocity of the salt is high in comparison with it of the surrounding rock. Note a mess inside the salt dome which indicates that the lateral velocity variation is too severe for the time migration. |
|
|
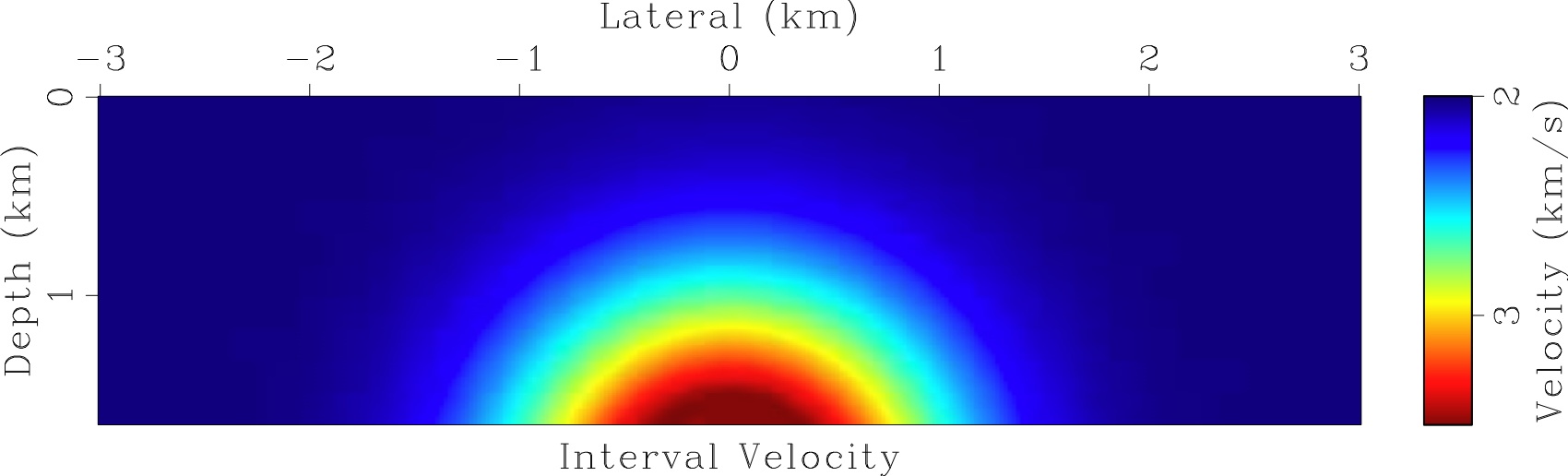
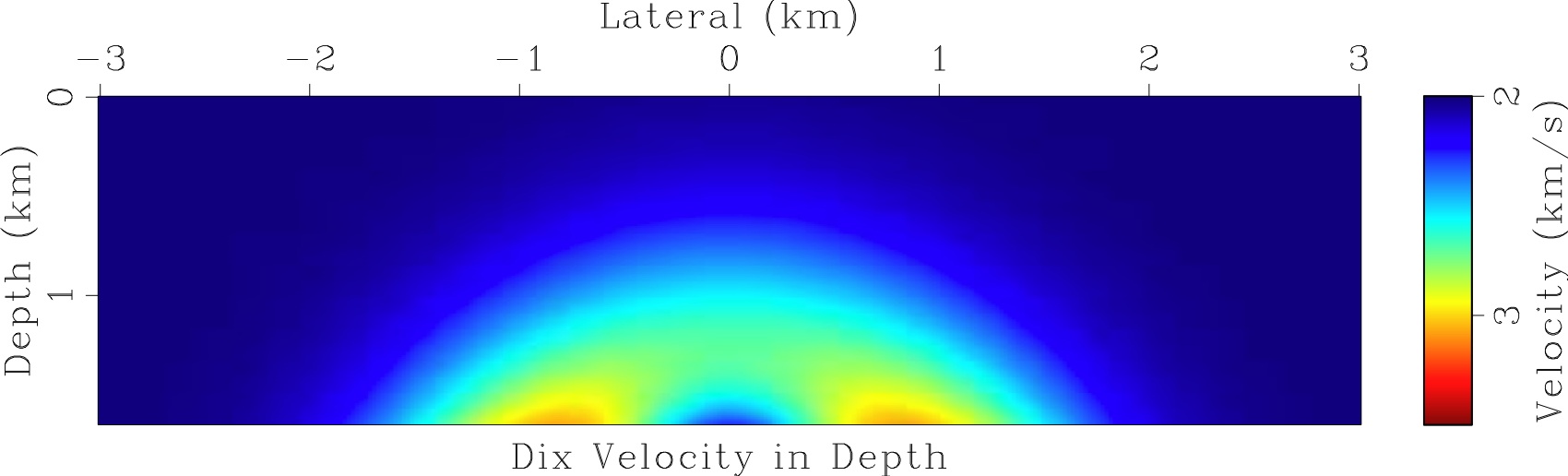
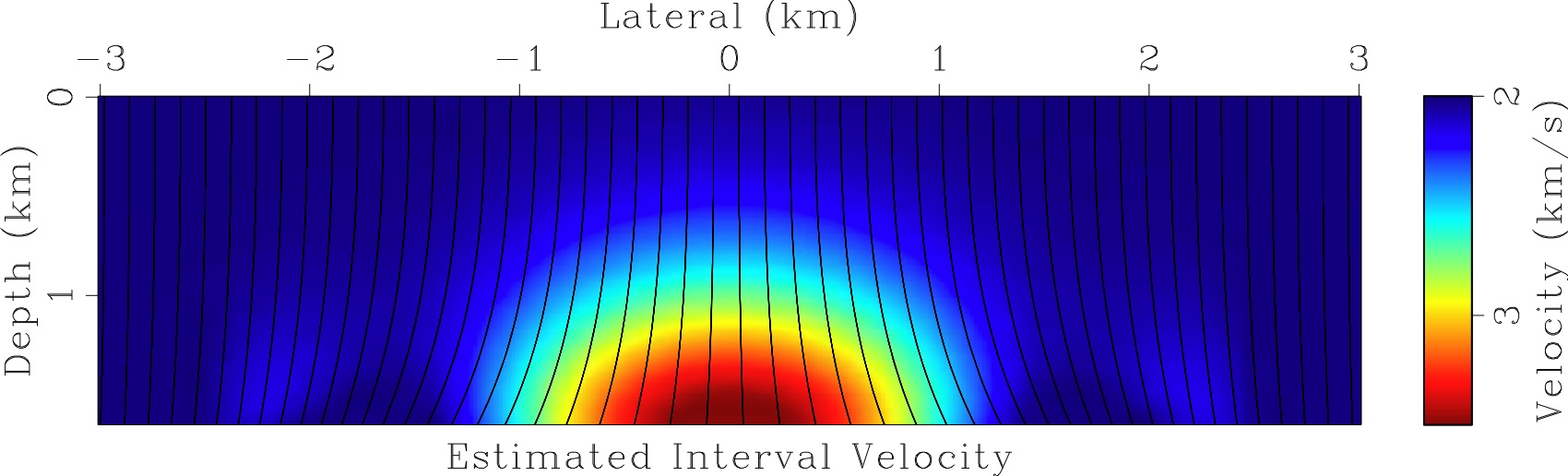
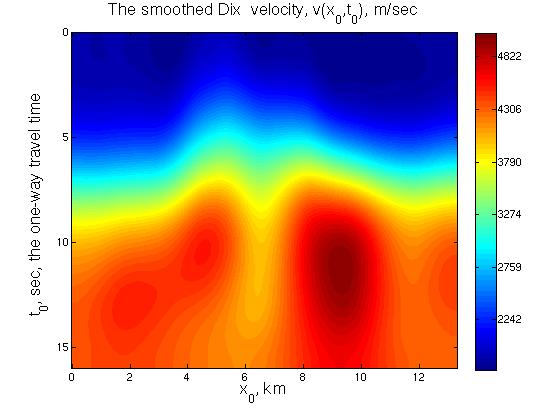
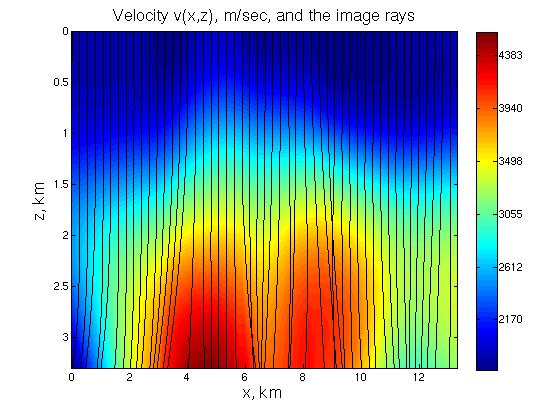
Left: the input data: the Dix velocity. The Dix velocity was obtained from the time migration velocity shown in the figure above and then smoothed. Right: the seismic velocity found by our level set algorithm, and the image rays computed for the found velocity. Note that they diverge and intersect and our algorithm successfully handled this. The seismic velocity was cut off at 3.3 km in depth to make the velocity array rectangular. |
|
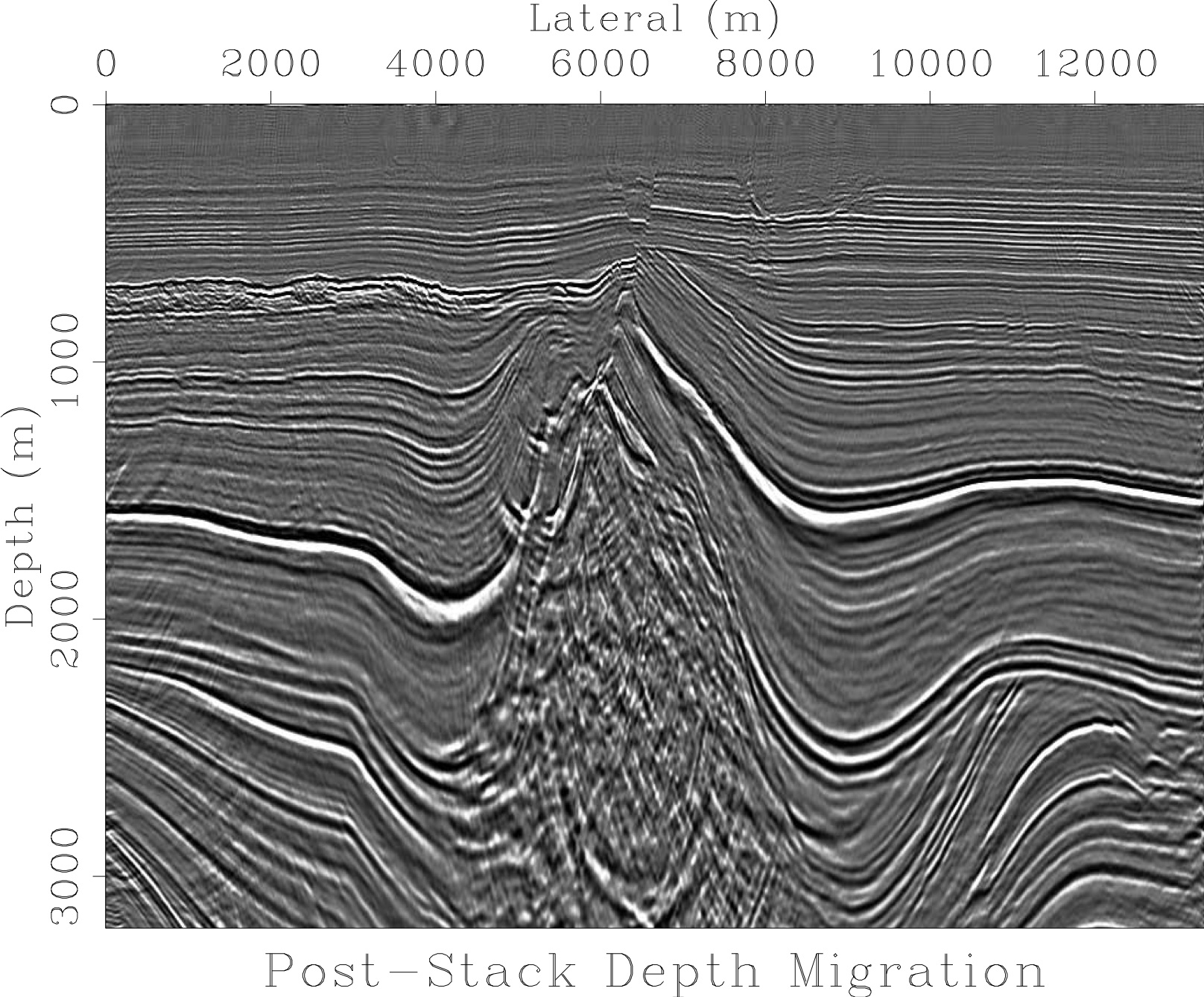
The depth migrated image of produced using the seismic velocity
found by our level set algorithm.
The image is in the depth (regular Cartesian) coordinates. It is up to 3.3 km in depth which is quite deep according to the geophysical standards. There is a mess inside the salt dome but the surrounding layers are resolved well. Overall, this image looks reasonable. |
-
Seismic Velocity Estimation using Time Migration Velocities
,
Cameron, M. K., Fomel, S. B., Sethian, J. A., Inverse Problems, submitted for publication, 2006.This paper List of downloadable publications -
Seismic velocity estimation and time-to-depth conversion of time-
migrated images,
Cameron, M.K., Fomel, S., Sethian, J.A., (SVIP 1.7), SEG conference 2006, New Orleans, LAThis paper List of downloadable publications