OVERVIEW
APPLICATIONS
INTERACTIVE APPLETS
HISTORY OF THE METHODS/FLOW CHART
PUBLICATIONS
EDUCATIONAL MATERIAL
ABOUT THE AUTHOR/CV
Copyright:
1996, 1999, 2006
J.A. Sethian
Seismic velocity estimation
|
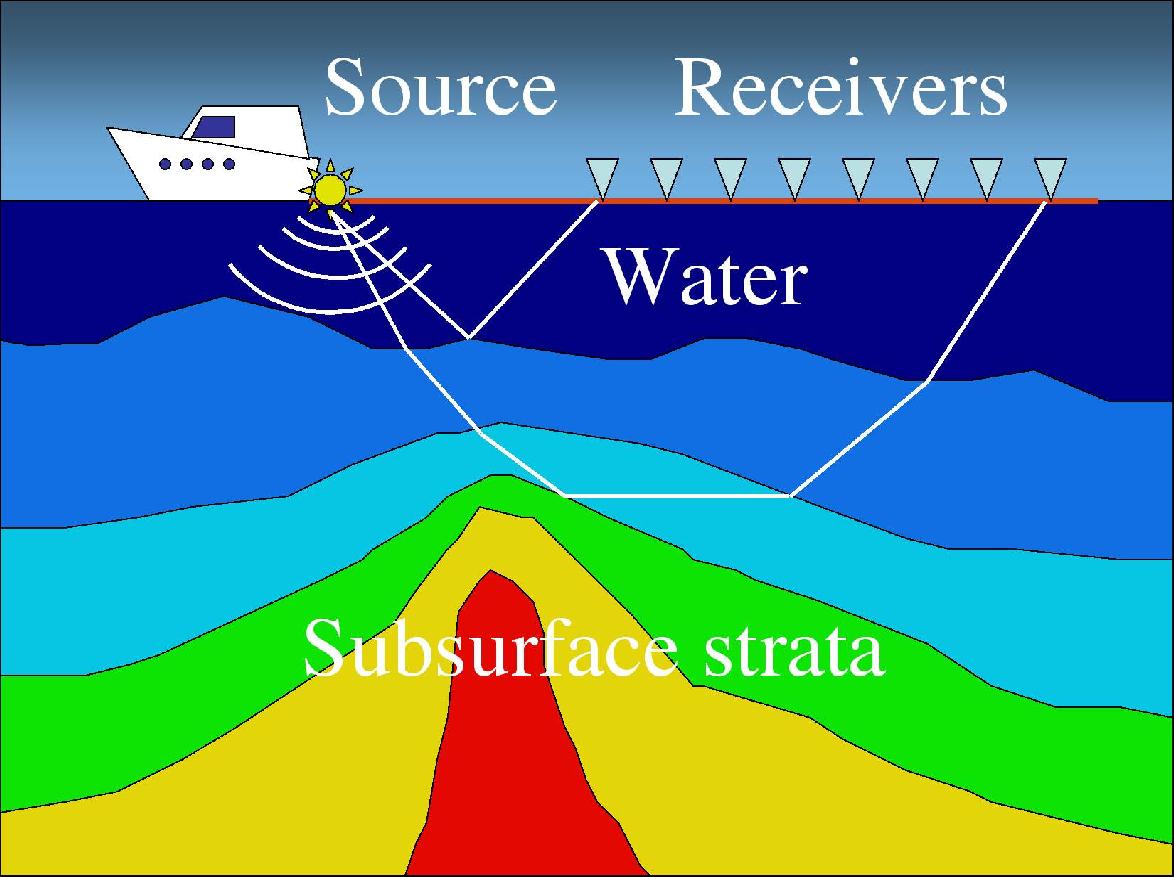
Imagine a boat producing explosions at equal intervals of time. The pressure waves propagate down to the seabed and deeper into the earth and reflect from all of the layer boundaries. Then the amplitudes of the reflected signals are recorded by receivers on the cable pulled by the boat. These records are the typical seismic data. Our goal is to build a fast and robust algorithm for finding the sound speed inside the earth (so called "seismic velocity") from these data. Why is this important? Seismic velocity is necessary for obtaining accurate seismic images - images of layers and cracks inside the earth. These images are very helpful for determining, for example, where to drill for oil. Often oil gets trapped at the sides of a salt dome schematically shown here by the red color. Typically, salt is light and it pushes the layers up as it rises from inside the earth. |
|
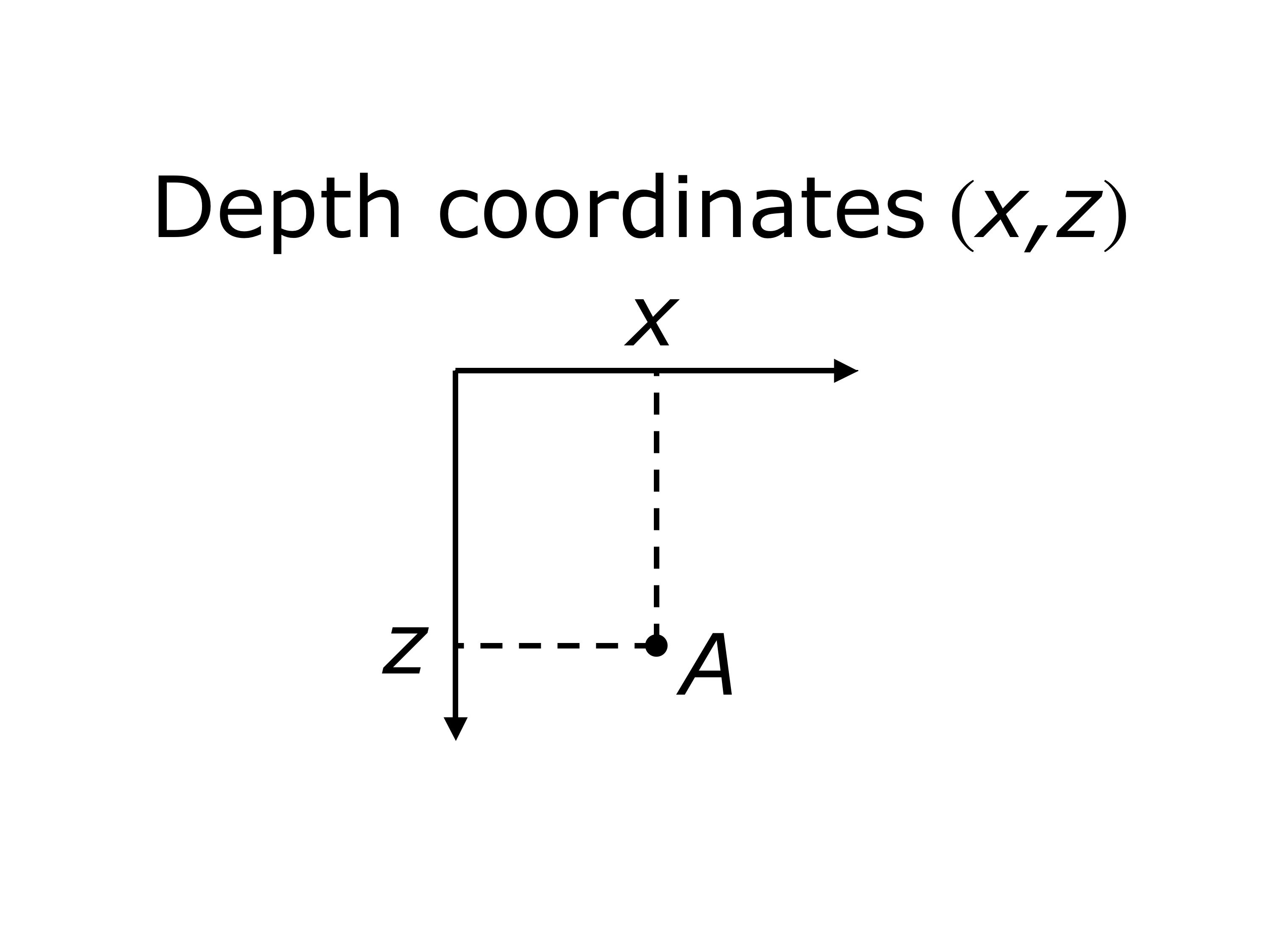
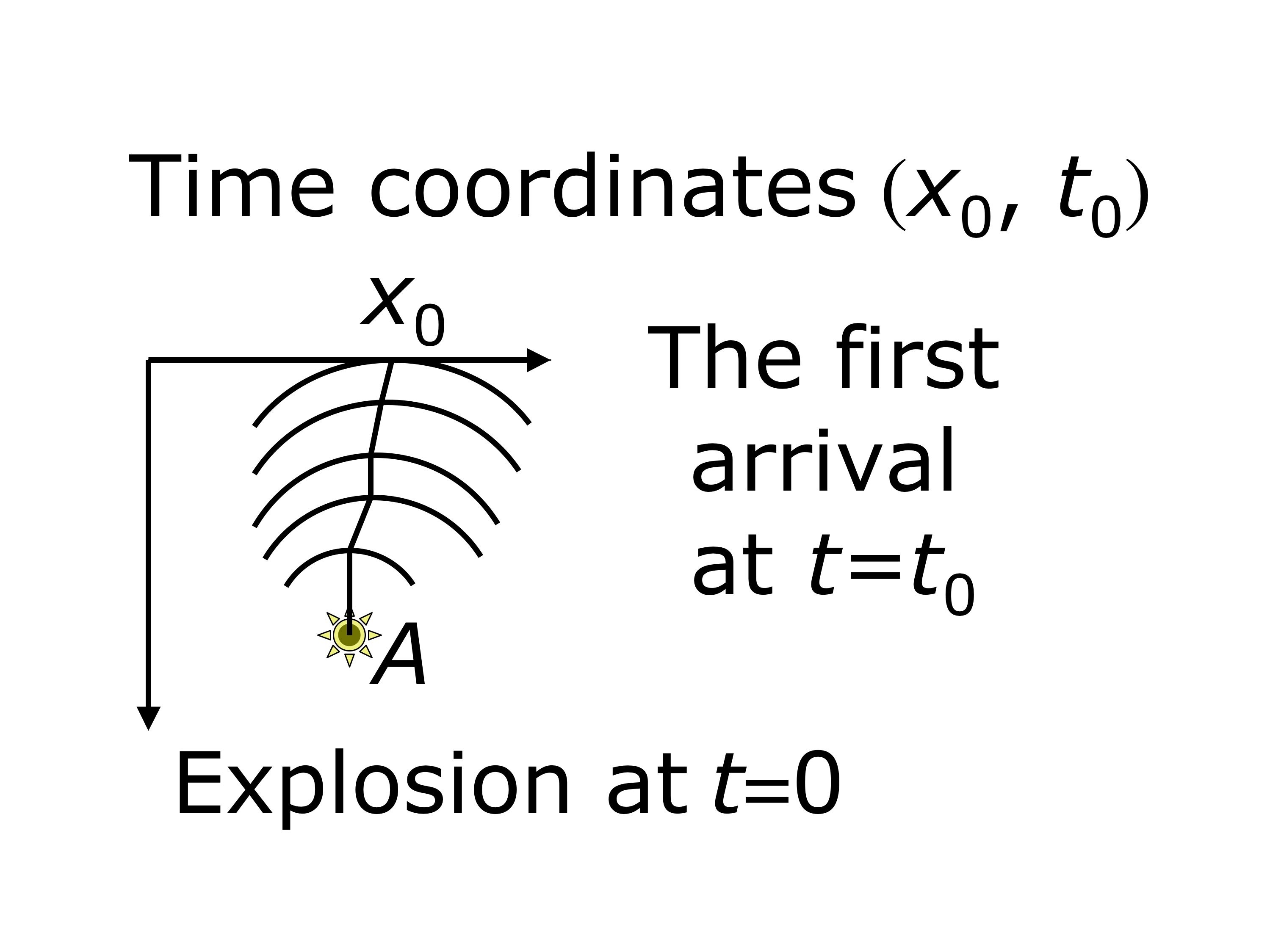
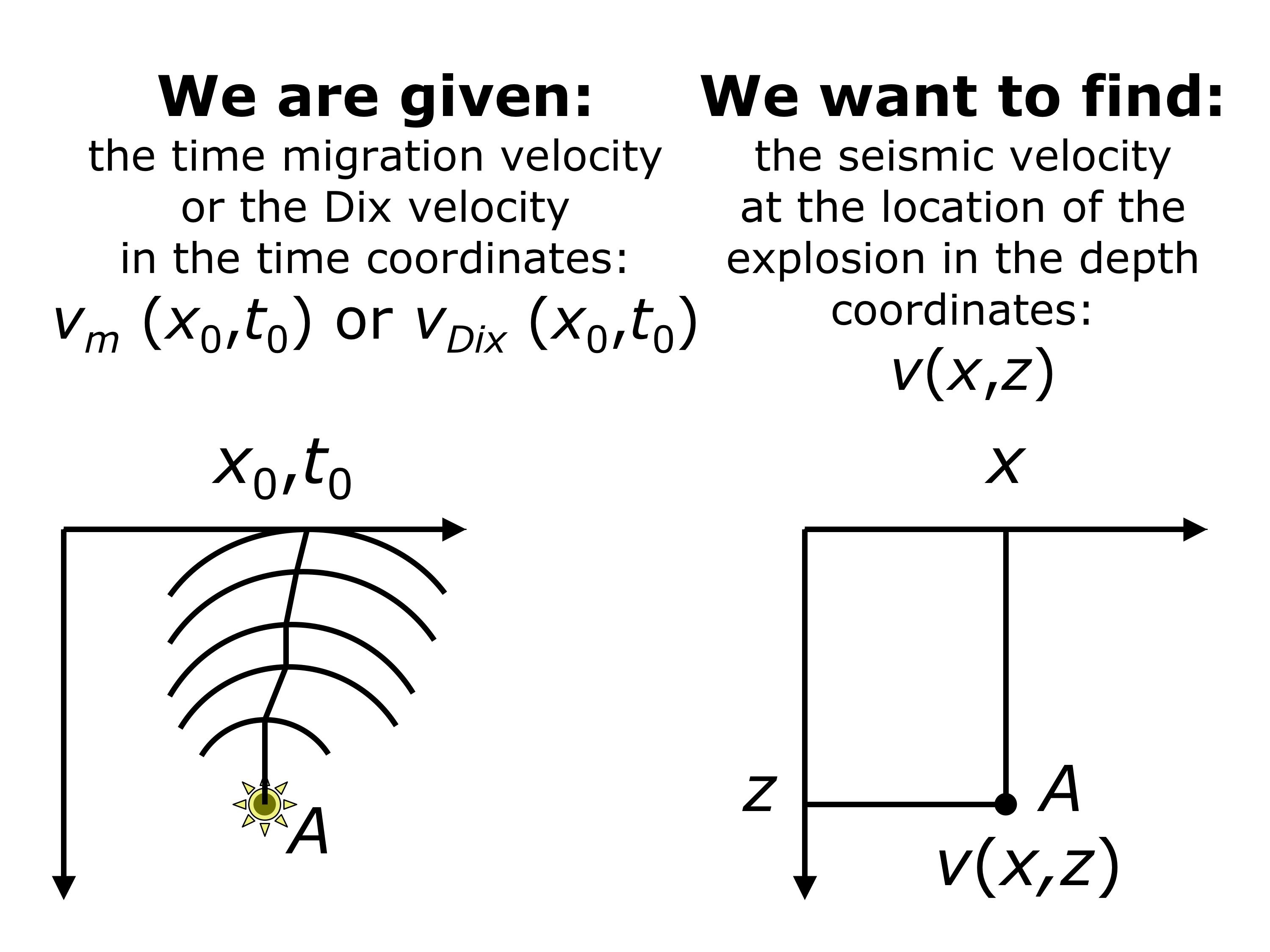
Time and depth coordinates
|
|
What are the problems with the existing seismic imaging?
Nowadays there are two approaches to seismic imaging called time migration and depth migration.
Time migration is fast and efficient but:
|
|
The central idea
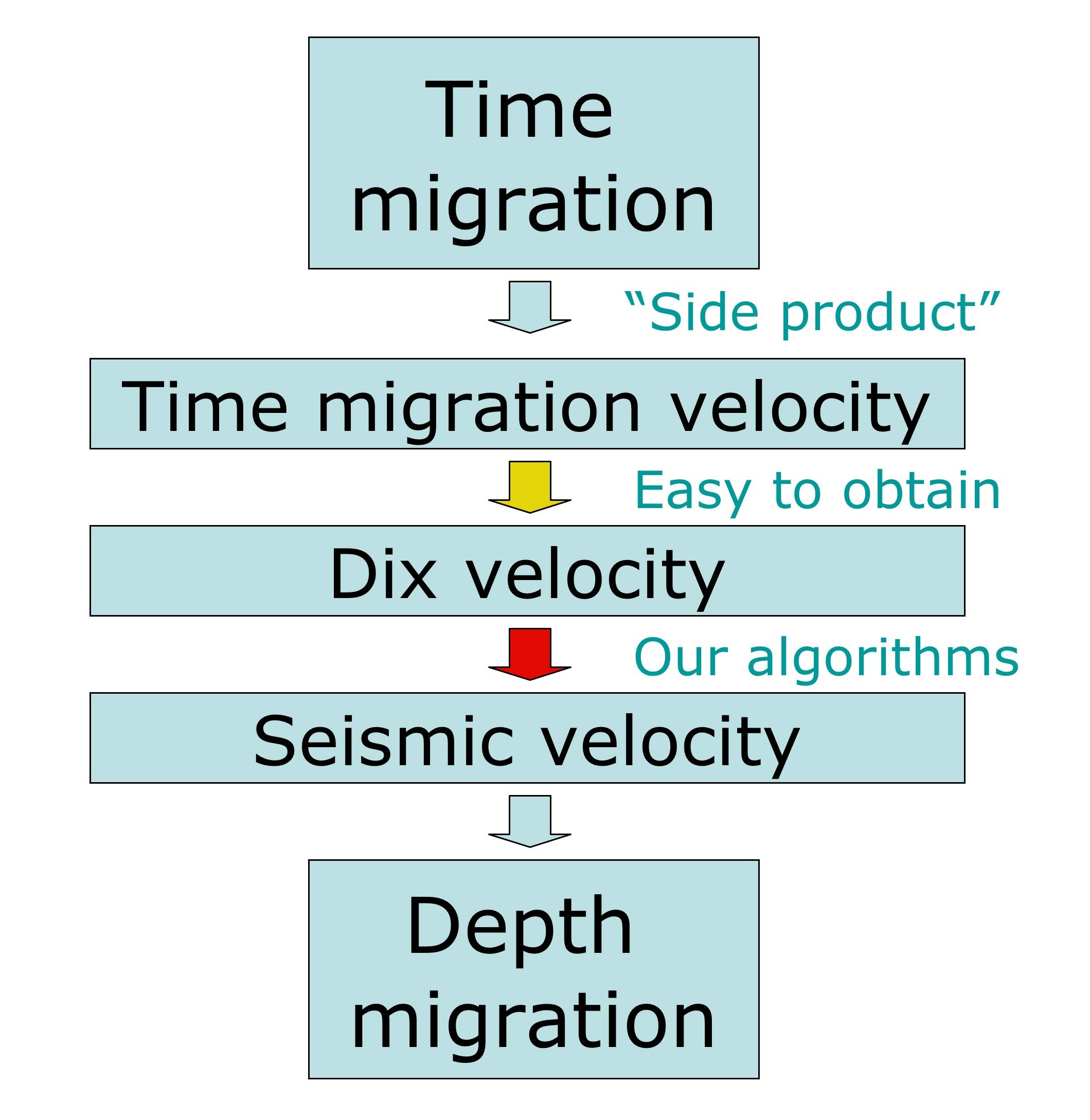
Time migration produces so called time migration velocity
as a "side product". This velocity is close to the root-mean-square velocity
if the seismic velocity inside the earth depends only on the depth. If it is not so,
it is some kind of mean velocity. The main idea of this work is
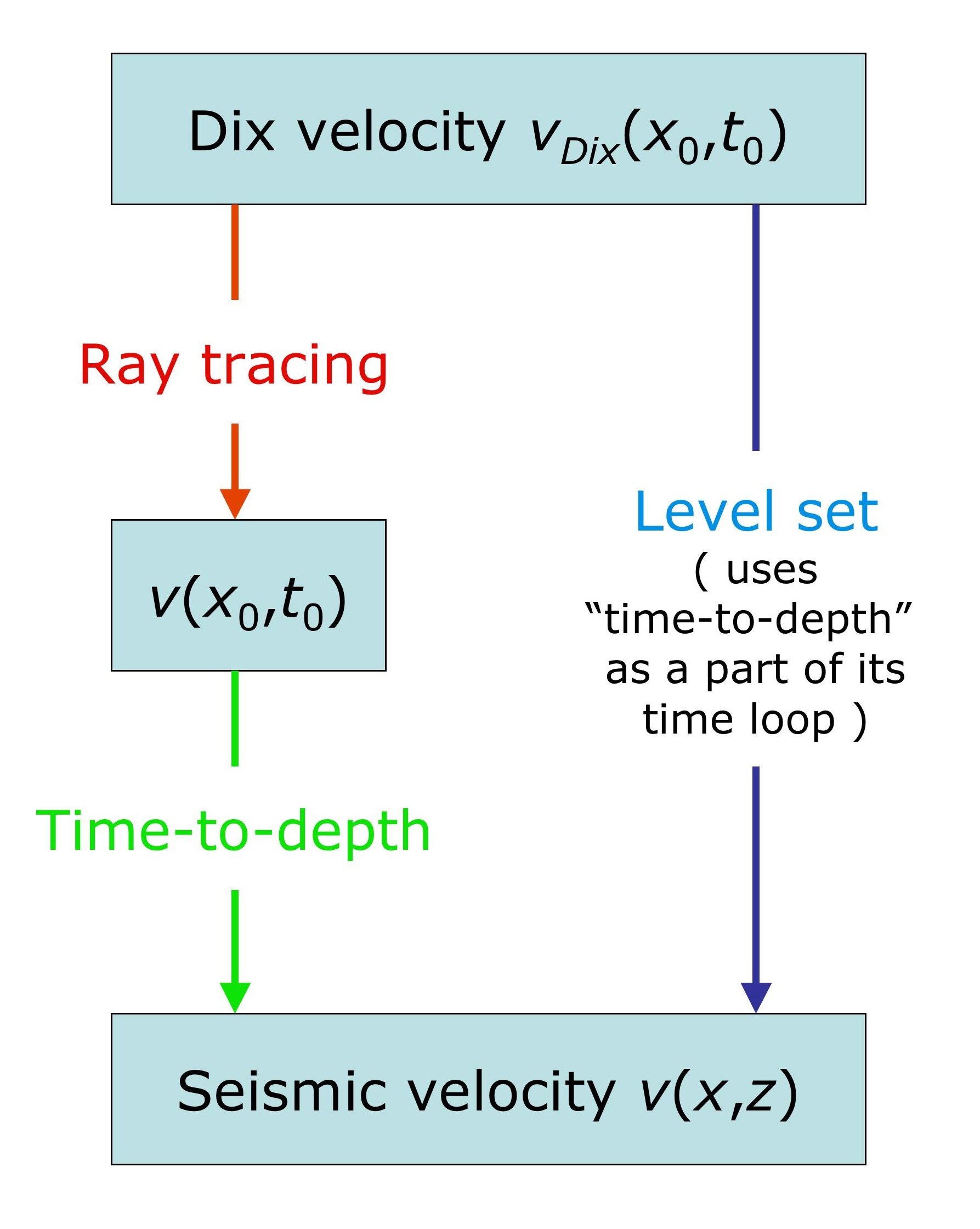
In 1955 an american geophysicist C. Hewitt Dix published a work on how the time migration velocity relate to the seismic velocity for the case of flat horizontal layers and velocity constant within each of them. Nowadays his method ("Dix conversion") is still in use. The result of application of his formula to the time migration velocity is called the Dix velocity. For convenience, we use the Dix velocity rather than the time migration velocity as the input for our numerical algorithms. The conventional method for finding the seismic velocity from the time migration velocity is the Dix method. It is adequate only for the flat horizontal layers and seismic velocity depending only on the depth. As we show in the present work, it may qualitatively differ from the true seismic velocity. |
|
The inverse problem
The main results
- Relation between the time migration velocity and the true seismic velocity in 2D and 3D.
- Three numerical algorithms constructing the seismic velocity from
the time migration velocity with some limitations:
- an efficient time-to-depth conversion algorithm
- an algorithm based on the ray tracing approach
- an algorithm based on the level set approach
Numerical algorithms
The propagation of the pressure wave front can be described by the Eikonal equation.
Its right-hand side is the unknown seismic velocity.
|
|
The main difficulty and its resolution
Synthetic data example
Field data example
|
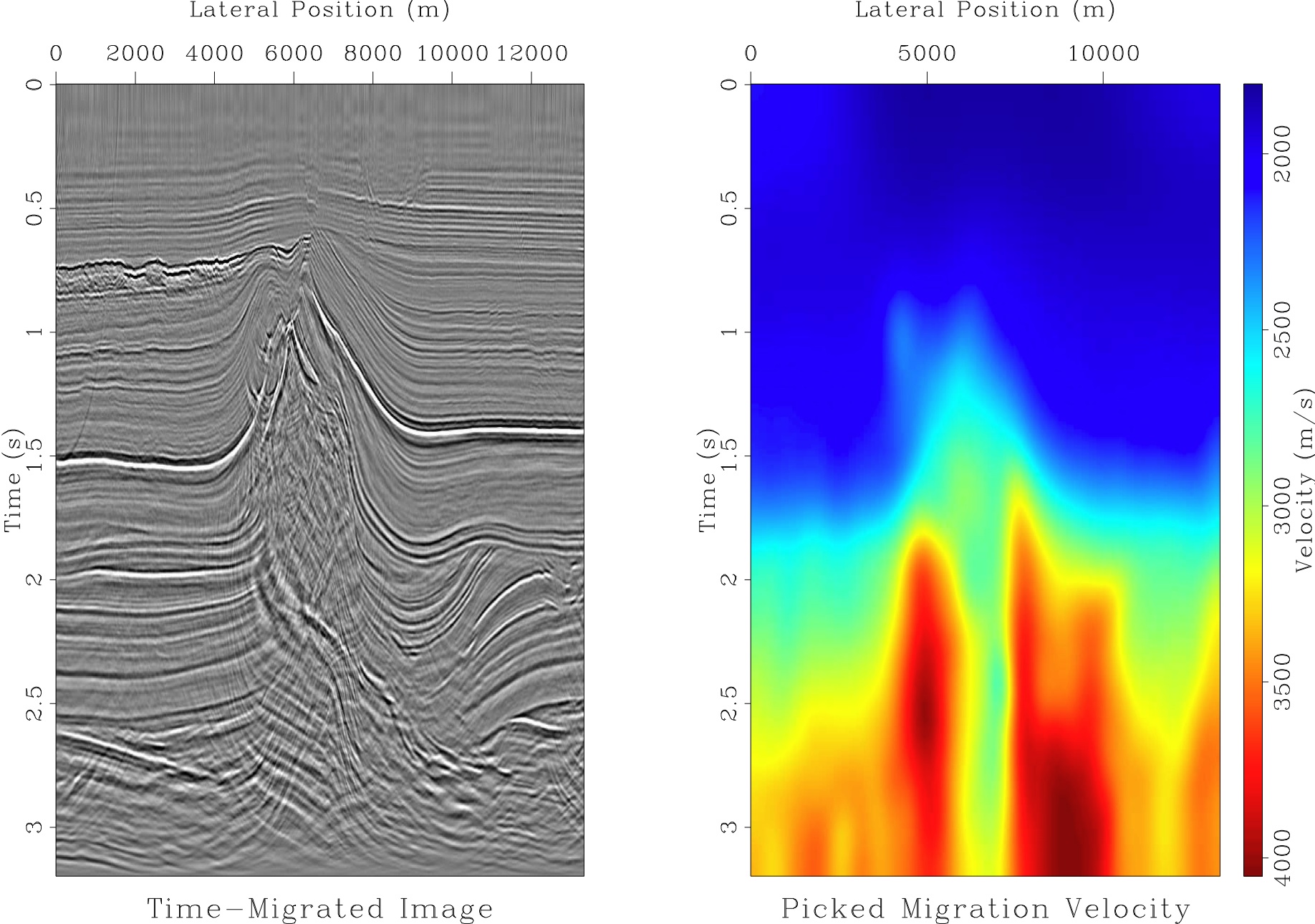
Left: seismic image from the North Sea obtained by the time migration.
Right: the corresponding time migration velocity. The image is in the time coordinates. The main feature in it is the salt dome in the middle. typically, the seismic velocity of the salt is high in comparison with it of the surrounding rock. Note a mess inside the salt dome which indicates that the lateral velocity variation is too severe for the time migration. |
|
|
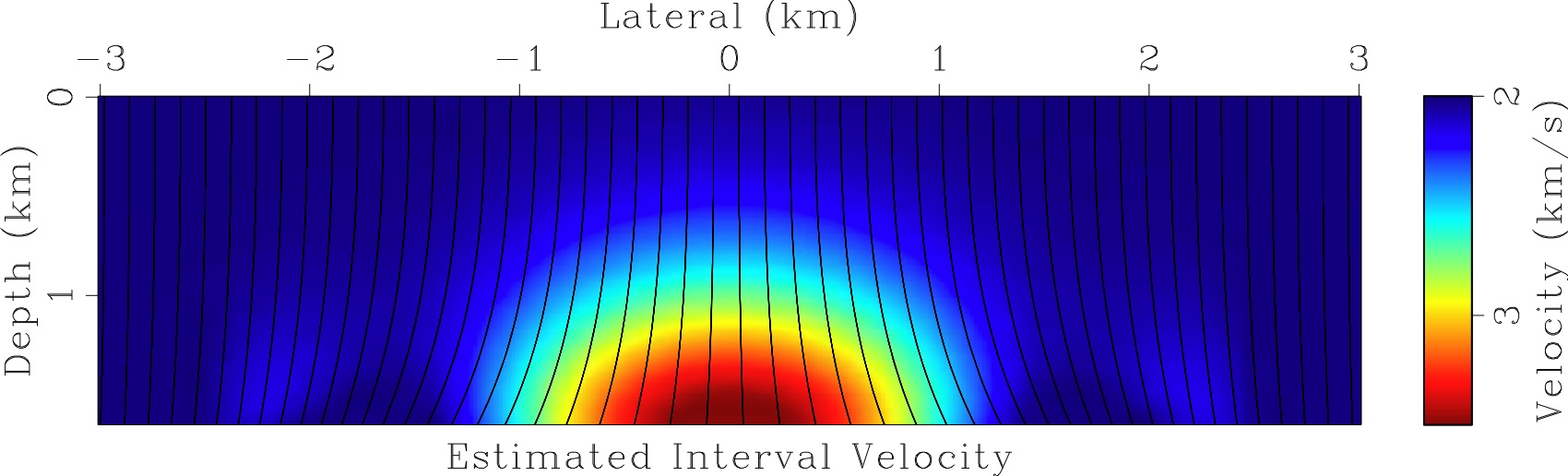
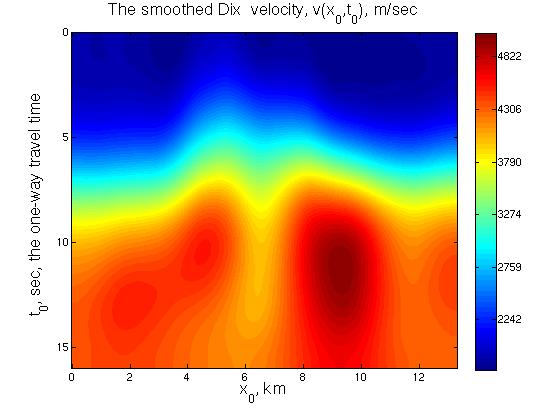
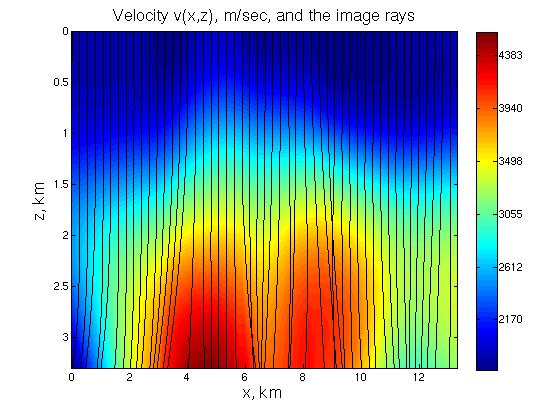
Left: the input data: the Dix velocity. The Dix velocity was obtained from the time migration velocity shown in the figure above and then smoothed. Right: the seismic velocity found by our level set algorithm, and the image rays computed for the found velocity. Note that they diverge and intersect and our algorithm successfully handled this. The seismic velocity was cut off at 3.3 km in depth to make the velocity array rectangular. |
|
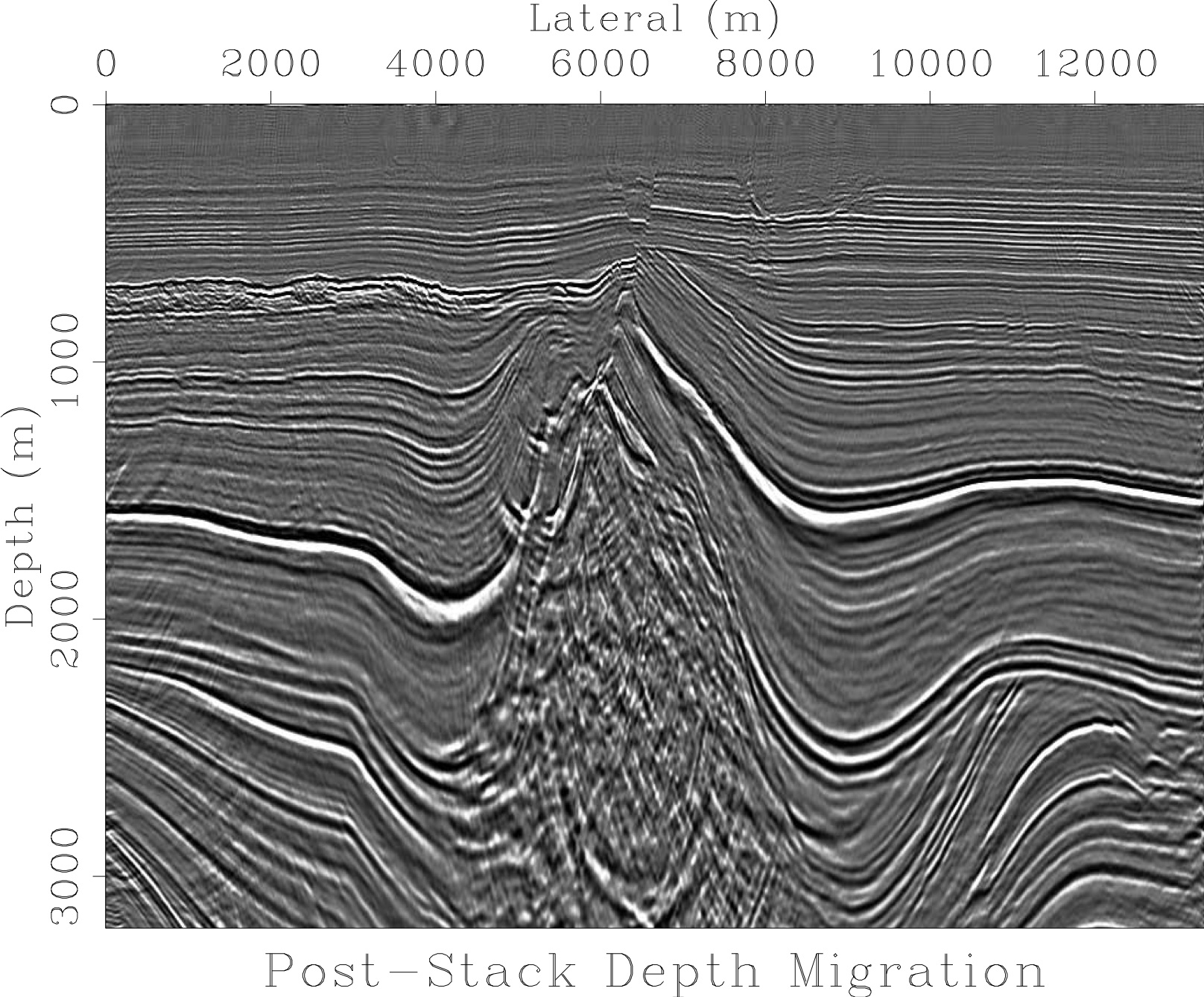
The depth migrated image of produced using the seismic velocity
found by our level set algorithm.
The image is in the depth (regular Cartesian) coordinates. It is up to 3.3 km in depth which is quite deep according to the geophysical standards. There is a mess inside the salt dome but the surrounding layers are resolved well. Overall, this image looks reasonable. |
-
Seismic Velocity Estimation using Time Migration Velocities
,
Cameron, M. K., Fomel, S. B., Sethian, J. A., J. Comp. Phys., 2006, in progress.